„`html
Још као мали, био сам опчињен цртаним филмовима где су се аутомобили кретали сами од себе. То ме је навело да се питам да ли је тако нешто уопште могуће и да ли су у тим аутомобилима били некакви мали роботи који су их возили.
Сада, када смо старији, самовозећи аутомобили више нису само машта, већ стварност! Искрено, они ме фасцинирају. Занима ме како препознају када треба да се зауставе на знаковима или црвеном светлу? Да ли уопште могу да примете пешаке или животиње? А како се сналазе када је мрак или када су лоши временски услови, попут кише или снега?

Поразговарајмо о аутомобилима који возе сами! То су возила која се крећу без људског возача. Компаније попут Тесле и Ваима користе паметне рачунарске технике, попут дубоког учења, како би ова возила била изузетно интелигентна. Дубоко учење помаже аутомобилима да разумеју саобраћајне знаке и безбедно возе, чак и у лошим временским условима. Све се своди на употребу напредне технологије која ће променити начин на који се крећемо у будућности!
Историјски развој
Прича о самовозећим аутомобилима је попут дуге и узбудљиве авантуре. Замислите двадесете године прошлог века, када су аутономна возила била само сан. Изумитељ по имену Францис Хоудина је направио аутомобил који је пратио линије на путу, али му је за то било потребно да има скривене жице испод пута.
 Извор: тхеатлантиц.цом
Извор: тхеатлантиц.цом
Осамдесетих и деведесетих година, стручњаци на Универзитету Карнеги Мелон су направили велики напредак. Развили су аутомобиле који су могли да „виде“ путем камера, што им је омогућило да се крећу градским улицама. Ови аутомобили су учили посматрањем околине.
Године 2004. догодио се значајан тренутак, у пустињској трци. Самовозећи аутомобили су учествовали у тешкој трци, коју нису победили, али је то био добар почетак. То је био њихов тренинг полигон за будући развој.
Међутим, прави пробој се догодио 2000-их и 2010-их, када су се велике компаније као што су Тесла, Убер и Гугл (сада Ваимо) укључиле у аутомобилски сектор. Гугл је почео да тестира самовозеће аутомобиле 2009. године. А већ 2015. године, Тесла је представио функцију делимичне самосталне вожње на одређеним путевима. Ови аутомобили су могли да управљају и да се држе пута без сталне људске контроле.
Како се све више компанија укључивало, трка за стварањем потпуно самовозећих аутомобила је постајала све жесточа. Замислите тимове проналазача који се такмиче да направе аутомобиле који могу сами да возе, без потребе да људи управљају њима.
Али, прича се наставља. Још увек радимо на развоју аутомобила који сами могу да возе, што ће променити начин на који путујемо. Ова авантура је још увек у току, што значи да бисмо у будућности могли да имамо сигурнија и лакша путовања, јер ови напредни самовозећи аутомобили постају све бољи.
Како функционишу самовозећи аутомобили?
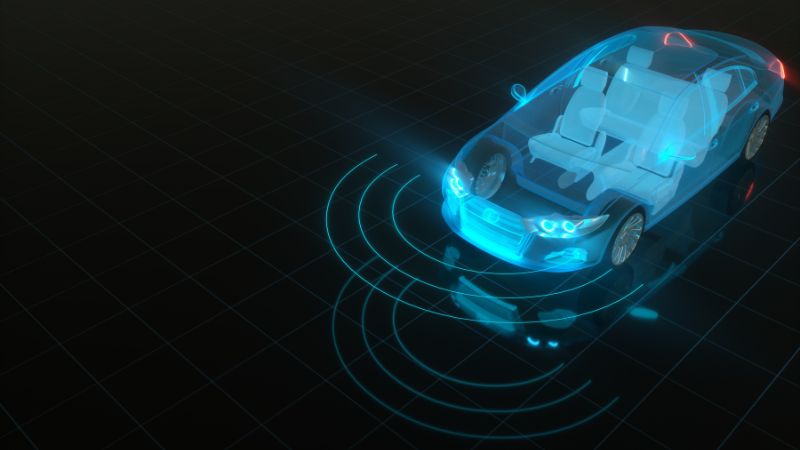
Аутомобили који сами возе су као суперпаметни доносиоци одлука! Они користе камере, ЛиДАР, РАДАР, ГПС и инерционе сензоре да би сакупљали информације о околини. Затим, специјални алгоритми, познати као алгоритми дубоког учења, обрађују те информације и разумеју шта се дешава у њиховој близини. На основу овог разумевања, доносе важне одлуке како би вожња била безбедна и глатка.
 Извор: архива.орг
Извор: архива.орг
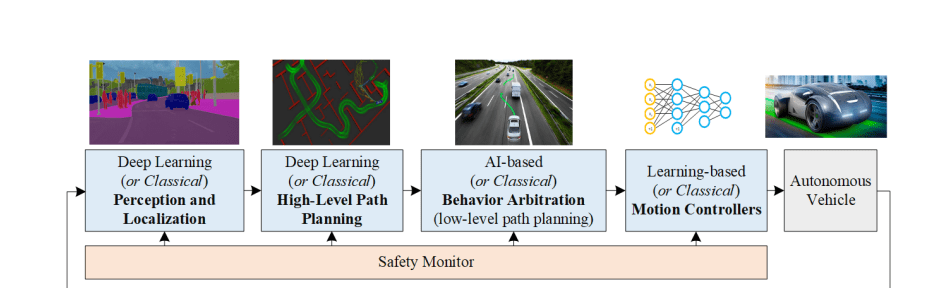
Да бисмо боље разумели како самовозећи аутомобили функционишу, размотрићемо четири главна дела приказана на дијаграму. То је као слагање слагалице – разумевање сваког дела нам помаже да стекнемо ширу слику о томе како ова невероватна возила раде:
- Перцепција
- Локализација
- Предвиђање
- Одлучивање
- Планирање путање
- Арбитража понашања
- Контролер кретања
Перцепција
#1. Камера
Камере су попут очију самовозећег аутомобила – од изузетне су важности! Оне помажу аутомобилу да зна шта се дешава око њега. Ове камере имају различите улоге, као што је препознавање објеката, раздвајање различитих делова и утврђивање где се аутомобил налази.
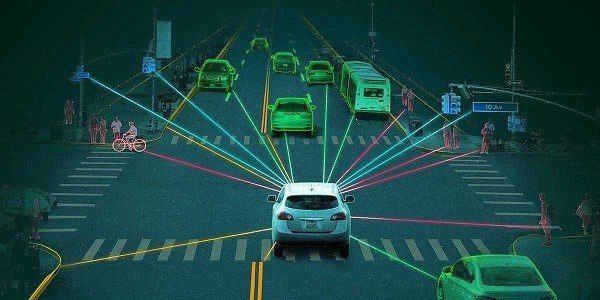
Како ништа не би промакло, камере су постављене свуда – напред, назад, лево и десно. Оне заједно стварају велику слику свега што се налази око аутомобила, слично панорамском погледу од 360 степени!

Ове камере нису ту само да би приказивале. Оне су паметне. Неке камере гледају далеко, до 200 метара, како би аутомобил могао да предвиди шта се спрема. Друге се фокусирају на блиске објекте како би аутомобил могао да обрати пажњу на детаље. Захваљујући овом тиму камера, аутомобил може да види и разуме све, као пријатељ који га води, како би могао безбедно да вози и доноси добре одлуке.
Понекад су камере веома корисне, на пример, при паркирању, јер пружају широк поглед и помажу у доношењу пажљивих одлука при вожњи.
Али, коришћење само камера за посматрање има својих мана, посебно у тешким временским условима као што су магла, јака киша или ноћ. У тим ситуацијама, слике са камера могу изгледати чудно, што може бити небезбедно.
Како би се превазишле ове изазовне ситуације, потребни су нам посебни сензори који могу радити када је мрачно или ноћ. Они такође треба да буду у стању да мере удаљеност објеката без потребе за видљивом светлошћу. Када ове сензоре уградимо у „очи“ аутомобила (систем перцепције), аутомобил ће бити бољи у вожњи при лошем времену или када је смањена видљивост. То значи да ће вожња бити сигурнија за све учеснике у саобраћају.
#2. ЛиДАР
ЛиДАР, што је скраћеница од Детекција и одређивање удаљености помоћу светлости, је напредна технологија која користи ласере за одређивање удаљености. ЛиДАР шаље ласерске зраке и мери колико им је времена потребно да се одбију од објеката.

Када ЛиДАР и камере раде заједно, аутомобил добија јаснији увид у окружење. ЛиДАР ствара 3Д мапу свега што се налази око аутомобила. Ове информације могу да се обраде помоћу паметних рачунарских програма, који помажу аутомобилу да предвиди шта би други аутомобили могли да ураде. Ово је посебно корисно на компликованим местима, попут прометних раскрсница, јер аутомобил може да посматра друге аутомобиле и безбедно вози.
Међутим, ЛиДАР има ограничења која могу бити проблематична. Иако добро функционише ноћу и у мрачним условима, може имати потешкоће у условима кише или магле, што може довести до нетачне перцепције. Како бисмо превазишли ове проблеме, користимо ЛиДАР и РАДАР сензоре истовремено. Ови сензори пружају додатне информације које аутомобилу помажу да јасније разуме ситуацију, што га чини способнијим за самосталну, безбедну и бољу вожњу.
#3. РАДАР
РАДАР, што је скраћеница од Радио Детекција и одређивање удаљености, се већ дуго користи у разним областима, укључујући војску. РАДАР првобитно коришћен у војне сврхе за откривање објеката, израчунава удаљеност помоћу радио таласа. Данас је РАДАР веома важан за многа возила, а посебно за самовозеће аутомобиле.
РАДАР је одличан јер може да функционише у свим временским и светлосним условима. Уместо ласера, он користи радио таласе, што га чини флексибилним и веома корисним. Међутим, РАДАР се сматра сензором који ствара „шум“, што значи да може да детектује препреке чак и када их камера не види.
Мозак самовозећег аутомобила може да се збуни због свих додатних сигнала са РАДАРА, које називамо „шум“. Како би ово исправио, аутомобил мора да „очисти“ РАДАР информације и доноси боље одлуке.
Чишћење података подразумева коришћење посебних техника за раздвајање јаких сигнала од слабих, попут издвајања важних објеката од неважних. Аутомобил користи паметан трик, назван Брза Фуријеова трансформација (ФФТ), како би још боље разумео информације.
РАДАР и ЛиДАР дају информације о појединачним тачкама, слично тачкама на папиру. Како би боље разумео ове тачке, аутомобил користи нешто попут груписања, односно спајање сличних ствари. Аутомобил користи паметне статистичке методе, попут еуклидског груписања или груписања К-средстава, како би комбиновао сличне тачке и разумео их. Ово омогућава аутомобилу да вози паметније и безбедније.
Локализација
У самовозећим аутомобилима, алгоритми локализације имају кључну улогу у одређивању положаја и оријентације возила током кретања, што се назива визуелна одометрија (ВО). ВО идентификује и упарује кључне тачке у узастопним видео снимцима.
Аутомобил тражи посебне тачке у информацијама, попут ознака на мапи. Затим, користи статистичку методу звану СЛАМ како би сазнао где се ствари налазе и како се крећу. Ово помаже аутомобилу да разуме шта се налази у околини, попут путева и пешака.

А како би то још боље обавио, аутомобил користи дубоко учење, слично супер паметном рачунару.
Ове технике чине аутомобил добрим у разумевању ствари. Неуронске мреже, попут ПосеНет и ВЛоцНет++, користе информације о тачкама за процену 3Д положаја и оријентације објеката. Ове процене се затим користе за разумевање сцене, као што је приказано на слици испод. Комбинацијом математичких и паметних компјутерских техника, аутомобил зна где се налази и шта је око њега, што му омогућава да самостално и безбедно вози.
Предвиђање
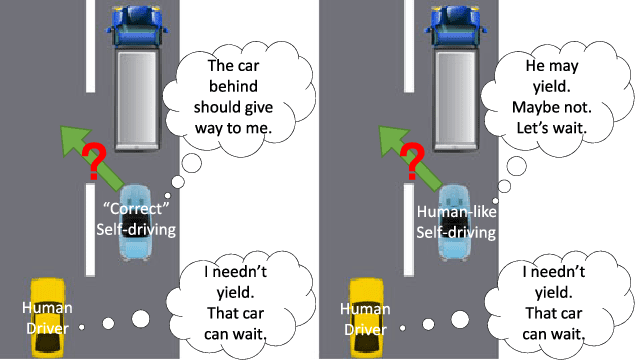
Разумевање људских покрета је веома сложен задатак, јер укључује емоције и реакције, а не директну логику. Пошто не знамо шта ће други возачи урадити, кључно је да самовозећи аутомобили могу добро да нагађају њихове поступке. Ово помаже у обезбеђивању безбедности на путу.
Замислите самовозеће аутомобиле који имају поглед од 360 степени, што им омогућава да виде све што се дешава. Они користе ове информације уз помоћ дубоког учења. Аутомобил примењује паметне технике како би предвидео шта би други возачи могли да ураде, попут планирања унапред у игри.
 Предвиђање уз помоћ дубоког учења
Предвиђање уз помоћ дубоког учења
Специјални сензори у самовозећим аутомобилима су попут њихових очију. Они помажу аутомобилима да препознају објекте на сликама, проналазе ствари у околини, знају где се налазе и где се ствари завршавају. Ово помаже аутомобилу да разуме шта је близу и да доноси паметне одлуке.
Током тренирања, алгоритми дубоког учења обрађују компликоване информације са слика и тачкастих података добијених од ЛиДАР-а и РАДАР-а. Током стварне вожње (закључивања), исти модел помаже аутомобилу да се припреми за могуће покрете, укључујући кочење, заустављање, успоравање, промену траке и друге радње.
Дубоко учење је као паметан помоћник за аутомобил. Захваљујући њему, аутомобил разуме ствари у које није сигуран, схвата своју локацију и боље вози. То помаже да вожња буде безбедна и глатка.
Али, изазов је одлучити која је најбоља акција од више опција. Одабир правих потеза захтева пажљиво размишљање како би аутомобил добро возио и остао безбедан.
Одлучивање
Аутомобили који сами возе морају да доносе важне одлуке у компликованим ситуацијама, што није лако. Сензори можда нису увек савршени, а пешаци и возачи могу да ураде неочекиване ствари. Аутомобил мора да нагађа шта ће други урадити и да се креће тако да избегне сударе.
Да би донео одлуку, аутомобилу је потребно много информација. Сакупља их помоћу сензора, а затим користи алгоритме дубоког учења како би разумео где се ствари налазе и шта би се могло догодити. Локализација помаже аутомобилу да одреди своју почетну позицију, док предвиђање генерише више могућих радњи на основу околине.
Међутим, поставља се питање: како аутомобил бира најбољу акцију међу свим предвиђеним опцијама?
 Извор: семантицсцхолар.орг
Извор: семантицсцхолар.орг
Дубоко појачавајуће учење (ДРЛ) је техника за доношење одлука, која користи алгоритам назван Марковљеви процеси одлучивања (МДП). МДП помаже у нагађању како би се пешаци и возачи могли понашати у будућности. Када се више објеката креће, ствари постају компликованије, па самовозећи аутомобил мора да размотри још више могућих радњи.
Како би се решио изазов проналаска најбољег потеза за аутомобил, модел дубоког учења је оптимизован применом Бајесове оптимизације. У неким случајевима, користи се оквир који комбинује Скривени Марковљев модел и Бајесову оптимизацију, што омогућава самовозећем аутомобилу да ефикасно и безбедно вози у различитим сложеним ситуацијама.
 Извор: аркив.орг
Извор: аркив.орг
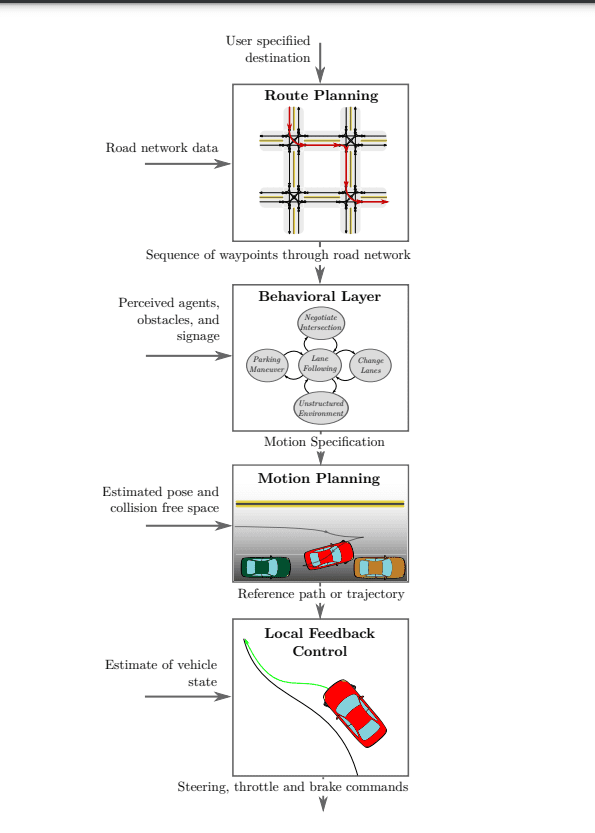
Процес доношења одлука у аутомобилима који сами возе је хијерархијски и састоји се од четири кључне компоненте:
Планирање путање или руте: На почетку вожње, аутомобил одређује најбољу руту од своје тренутне позиције до одредишта. Циљ је пронаћи најбољу руту међу више могућих.
Арбитража понашања: Након што је рута испланирана, аутомобил мора да је следи. Аутомобил је свестан статичних објеката, као што су путеви и раскрснице, али не може да предвиди поступке других возача. Како би се превазишла ова неизвесност, користе се паметне методе, као што су Марковљеви процеси одлучивања (МДП).
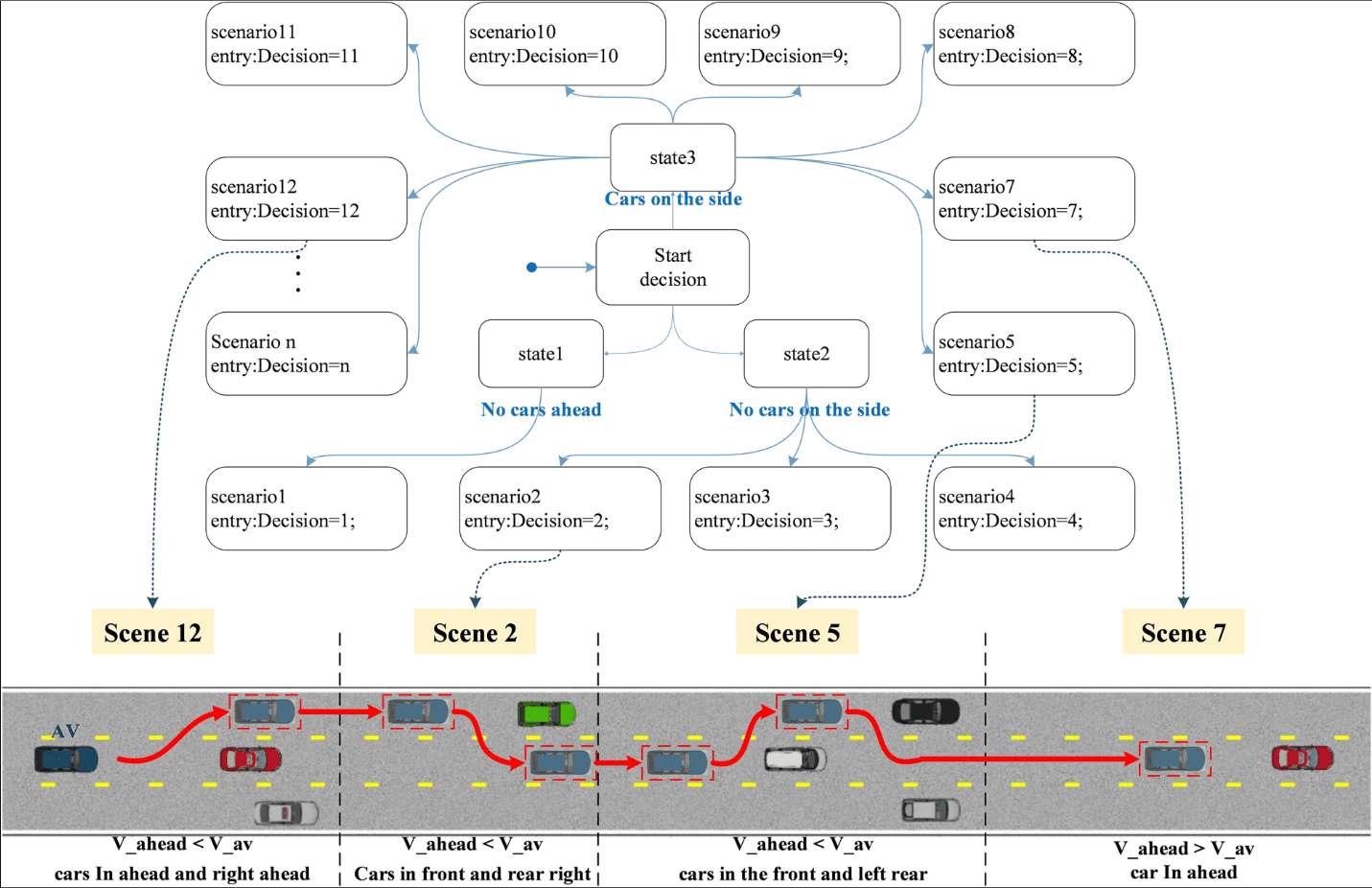 Одлука у зависности од сценарија
Одлука у зависности од сценарија
Планирање кретања: На основу испланиране руте и слоја понашања који одређује како се кретати, систем за планирање кретања координира кретање аутомобила. То значи да се аутомобил креће на начин који је сигуран и удобан за путнике. Систем узима у обзир брзину, промене траке и околину.
Контрола возила: Последњи корак је контрола возила, која реализује референтну путању генерисану системом за планирање кретања, осигуравајући да аутомобил безбедно прати планирану путању.
Разлагањем процеса доношења одлука на ове различите делове, самовозећи аутомобили могу добро и безбедно да возе у сложеним ситуацијама. На тај начин, путници имају глатку и удобну вожњу.
Конволуционе неуронске мреже
Конволуционе неуронске мреже (ЦНН) се широко користе у самовозећим аутомобилима због њихове способности да обрађују просторне информације, а посебно слике. ЦНН се истичу у издвајању карактеристика из слика, што их чини веома корисним у разним применама.
У ЦНН-у, како се дубина мреже повећава, различити слојеви препознају различите обрасце. Рани слојеви детектују једноставне карактеристике, попут ивица, док дубљи слојеви препознају сложеније, попут облика објеката (лишће на дрвећу или гуме на возилима). Због ове прилагодљивости, ЦНН је један од главних алгоритама у самовозећим аутомобилима.
Основна компонента ЦНН-а је конволуциони слој, који користи конволуционо језгро (матрица филтера) за обраду локалних делова улазне слике.
Матрица филтера се ажурира током тренирања како би се добила значајна тежина. Основна карактеристика ЦНН-а је дељење тежине, где се исти параметри тежине користе за различите трансформације, што штеди простор за обраду и омогућава различите приказе карактеристика.
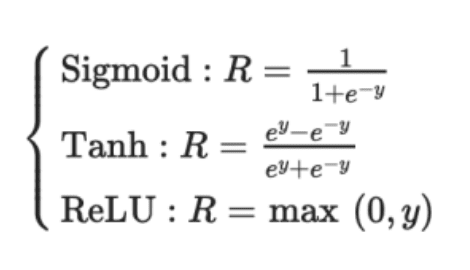
Излаз конволуционог слоја обично пролази кроз нелинеарну активациону функцију, попут Сигмоид, Танх или РеЛУ. РеЛУ је пожељнији јер се брже конвергује од осталих. Такође, резултат често пролази кроз слој максималног обједињавања, који чува важне детаље са слике, као што су позадина и текстуре.
Три основне карактеристике ЦНН-а их чине веома разноврсним и неопходним за самовозеће аутомобиле:
- Локална рецептивна поља
- Дељење тежине
- Просторно узорковање
Ове карактеристике смањују прекомерно прилагођавање и чувају кључне информације битне за класификацију слика, сегментацију, локализацију и друге процесе.
Ово су две ЦНН мреже које користе компаније које су пионири у развоју самовозећих аутомобила:
- ХидраНет од стране Тесла
- ChauffeurNet од Google Waymo
Сазнајте више о конволуционим неуронским мрежама.
#1. ХидраНет од стране Тесла
ХидраНет је динамичка архитектура коју су представили Рави и сарадници 2018. године, првенствено развијена за семантичку сегментацију у самовозећим аутомобилима. Њен циљ је побољшање рачунарске ефикасности током закључивања.
Концепт ХидраНет-а укључује различите ЦНН мреже, назване огранци, одређене за одређене задатке. Сваки огранак прима различите улазне податке, а мрежа може селективно да бира које ће огранке покренути током закључивања, при чему агрегира излазе из различитих грана како би донела коначну одлуку.
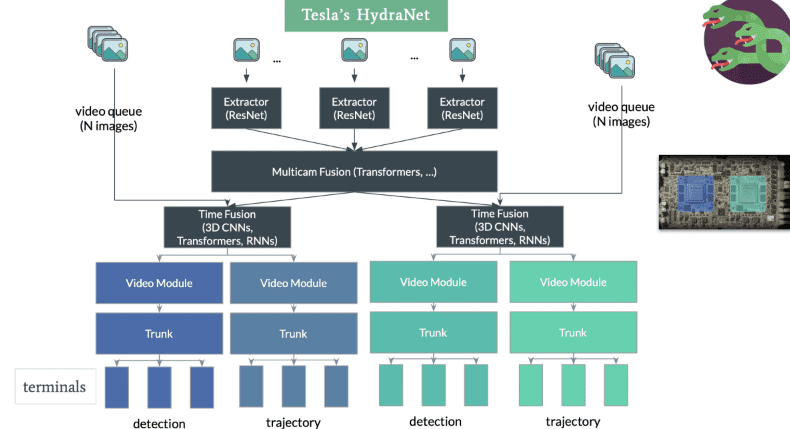
У контексту самовозећих аутомобила, улазни подаци могу да представљају различите аспекте окружења, попут статичних објеката (дрвеће и ограде), путева и трака, семафора итд. Ови улазни подаци се обрађују у одвојеним гранама. Током закључивања, механизам одлучује које гране ће активирати, а комбинатор прикупља њихове излазе како би донео коначну одлуку.
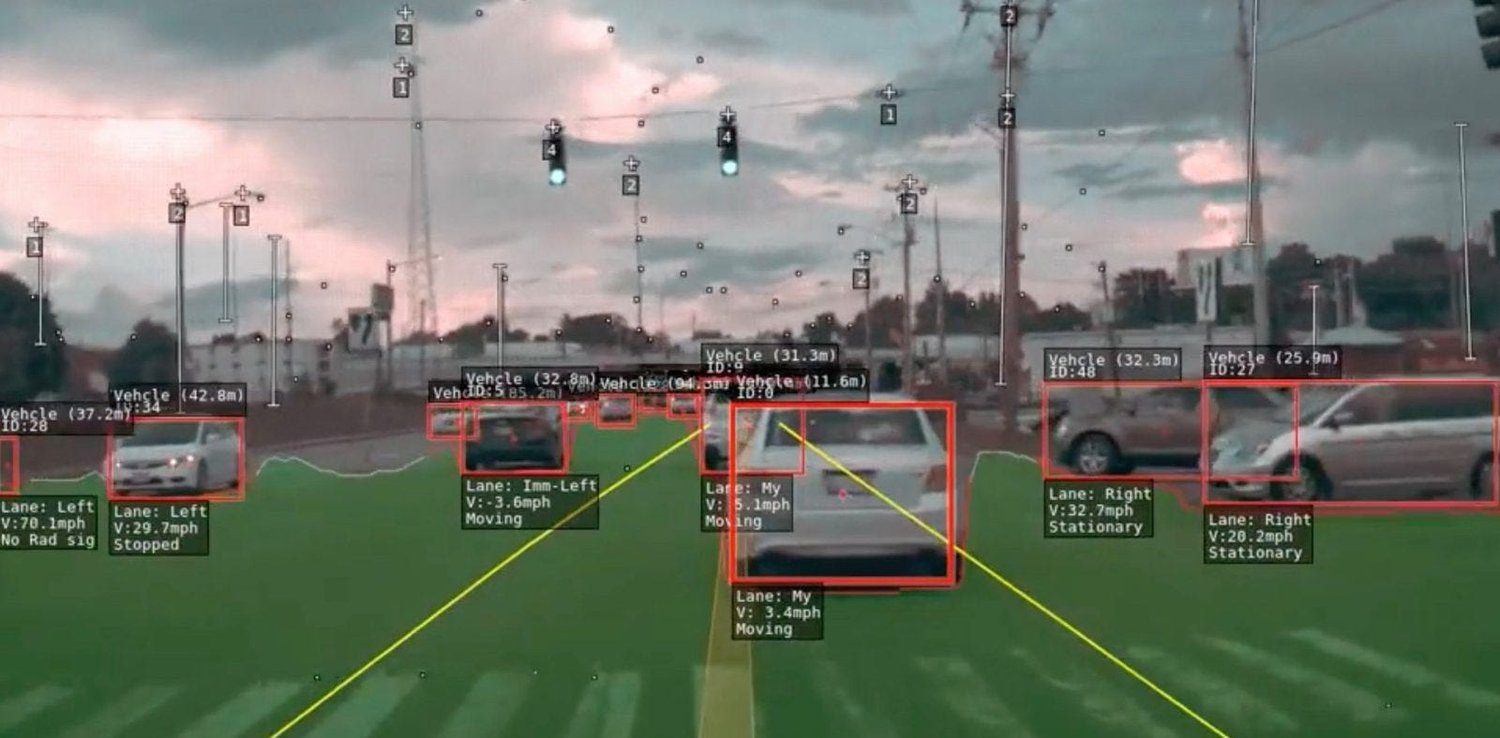 Детекција брзине, траке и кретања
Детекција брзине, траке и кретања
Тесла је прилагодио ХидраНет архитектуру уградњом заједничког „скелета“ за решавање проблема одвајања података за појединачне задатке током закључивања. Заједнички „скелет“, обично модификовани РесНет-50 блокови, омогућава да се мрежа тренира за податке о свим објектима. Задацима специфичне „главе“ засноване на архитектури семантичке сегментације, попут У-Нет, омогућавају моделу да предвиђа излазе специфичне за сваки задатак.

Теслин ХидраНет се истиче способношћу да пројектује поглед из птичје перспективе, стварајући 3Д приказ окружења из било ког угла, што помаже аутомобилу у бољој навигацији. Занимљиво је да Тесла то постиже без коришћења ЛиДАР сензора, већ се ослања само на два сензора: камеру и радар. Ефикасност Теслиног ХидраНет-а омогућава обраду информација са осам камера и стварање перцепције дубине, што показује импресивне могућности без додатне ЛиДАР технологије.
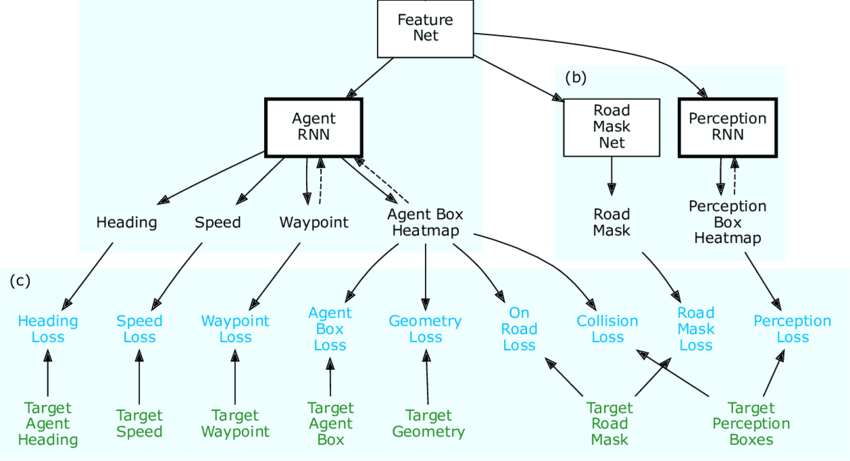
#2. ChauffeurNet од Google Waymo
ChauffeurNet је неуронска мрежа заснована на РНН-у коју користи Google Waymo за тренирање самовозећих аутомобила применом имитационог учења. Иако се првенствено ослања на РНН за генерисање путања вожње, укључује и ЦНН компоненту познату као FeatureNet.
Ова конволуциона мрежа издваја контекстуалне представе обележја које деле друге мреже и користи се за издвајање карактеристика из система перцепције.
 Извор: Researchgate
Извор: Researchgate
Концепт ChauffeurNet-а је да се тренира самовозећи аутомобил имитирањем стручних возача користећи