Glavni zaključci
- Samoupravljajući automobili oslanjaju se na tehnologiju mašinskog vida kako bi razumeli svoje okruženje, detektovali objekte, identifikovali znakove i navigirali putem.
- Mašinski vid u samovozećim automobilima koristi kombinaciju kamera, edge computing-a i AI algoritama koji zajedno prikupljaju vizuelne informacije, obrađuju ih u realnom vremenu i prepoznaju obrasce i objekte.
- Mašinski vid je ključan za postizanje potpune autonomije u samoupravljajućim automobilima, omogućavajući klasifikaciju objekata, detekciju traka i signala, identifikaciju znakova i prepoznavanje saobraćaja. Budućnost autonomnih vozila leži u napretku u veštačkoj inteligenciji, edge computing-u i tehnologiji kamera.
Samovozeći automobili su tema koja privlači veliku pažnju. Iako možda još uvek nemamo potpuno autonomna vozila, raspolažemo automobilima sa naprednim sistemima pomoći vozaču (ADAS) koji su sposobni za automatsko upravljanje, promenu trake, parkiranje i tempomat koji je svestan saobraćaja.
Automobil koji se samostalno kreće koristi brojne senzore za svoj ADAS, pri čemu je mašinski vid glavni način za otkrivanje, identifikaciju i procenu udaljenosti objekata i opšte okoline. Bez mašinskog vida, samovozeći automobili sa tempomatom i autopilotom bili bi znatno manje efikasni.
Šta je mašinski vid?

Mašinski vid je tehnologija koja mašinama daje sposobnost da vide i prepoznaju predmete u svom okruženju. To je podskup kompjuterskog vida koji je usmeren na industrijsku primenu detekcije objekata u autonomnim mašinama, kao što su roboti i vozila.
Savremeni mašinski vid koristi algoritme dubokog učenja veštačke inteligencije, poput konvolucionih neuronskih mreža (CNN), za kreiranje pouzdanih i generalizovanih modela koji mogu precizno identifikovati objekte u različitim uslovima. Ovo omogućava primenu mašinskog vida u različitim zadacima gde je potrebna visoka pouzdanost, uključujući proizvodnju, poljoprivredu, robotiku i automobilsku industriju.
Kako mašinski vid funkcioniše u samovozećim automobilima?
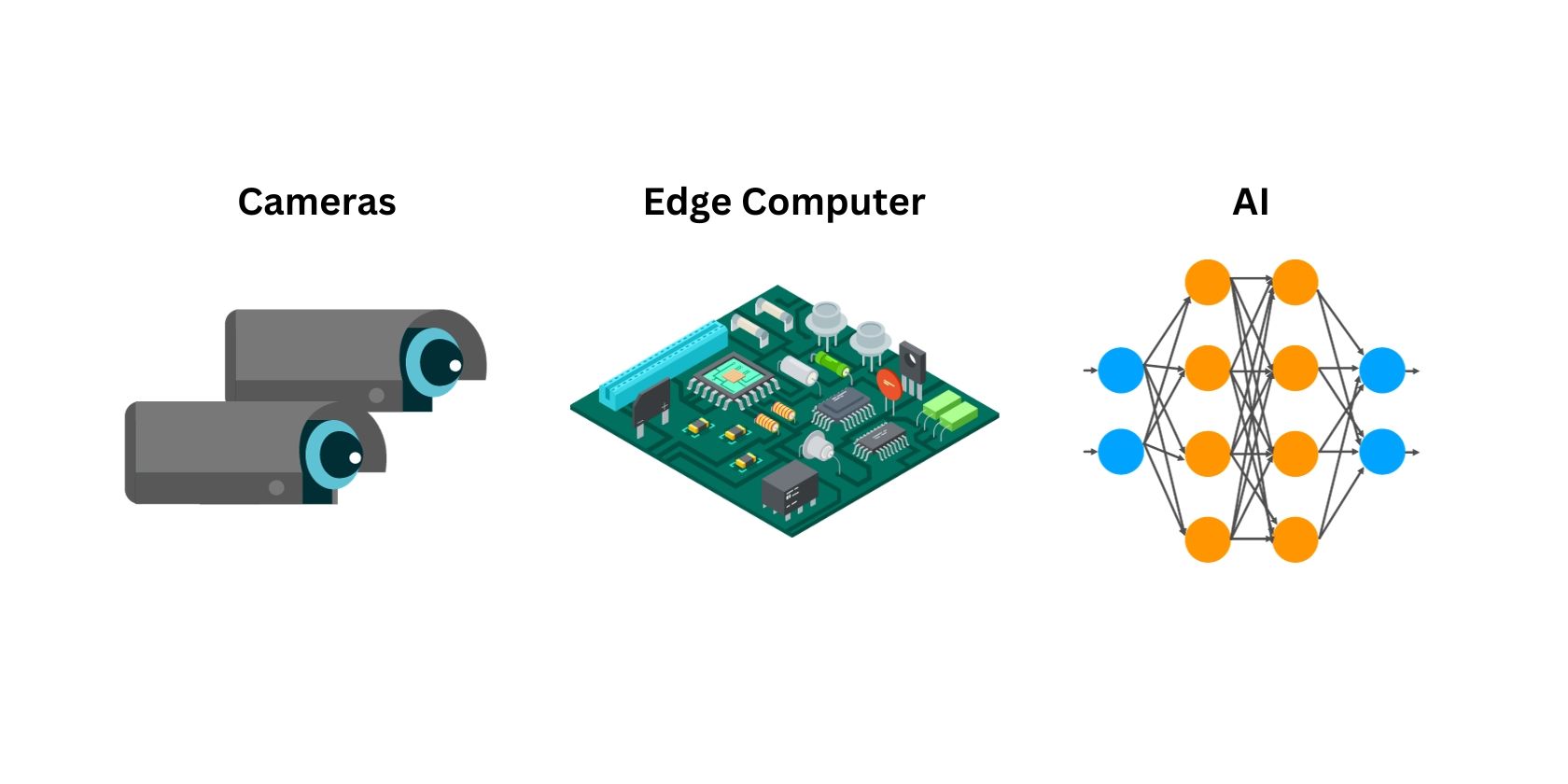
Mašinski vid u samovozećim automobilima može se podeliti na tri ključna segmenta: sistem kamera, obrada podataka (edge computing) i veštačka inteligencija (AI). Ova tehnologija omogućava autonomnom vozilu da „vidi“, „razmišlja“ i identifikuje saobraćajne znake i prepreke tokom vožnje. Pogledajmo detaljnije svaki deo kako bismo shvatili kako ove tehnologije zajedno formiraju mašinski vid automobila koji se samostalno kreće.
Sistem kamera
Mašinski vid se oslanja na sisteme kamera za prikupljanje vizuelnih informacija iz okruženja. Samoupravljajući automobili koriste više kamera postavljenih oko vozila kako bi sakupili što više vizuelnih podataka.
Dva glavna tipa senzora koriste se u kamerama za mašinski vid: komplementarni metal-oksid-poluprovodnici (CMOS) i uređaji sa napunjenim sprezanjem (CCD). Za samovozeće automobile, CMOS je često preferirani izbor zbog svoje velike brzine očitavanja, moćne elektronike i mogućnosti paralelnog procesuiranja, što ga čini bržim senzorom, iako je podložan šumu ili artefaktima. Rešenja poput različitih režima osvetljenja, digitalnog noćnog vida i filtera mogu pomoći CMOS senzoru u uslovima koji nisu idealni.
Kod samovozećih automobila, kamere su postavljene na određenoj udaljenosti jedna od druge kako bi omogućile stereoskopski vid. Stereoskopski vid je sposobnost kombinovanja dva ili više vizuelnih ulaza, stvarajući osećaj dubine ili trodimenzionalnosti objekata i okruženja. To omogućava automobilima da trianguliraju i izračunaju približnu udaljenost između objekta i vozila.
Ljudi takođe koriste stereoskopski vid zahvaljujući svojim očima. Možete i sami isprobati: zatvorite jedno oko i odaberite manji predmet sa stola. Stavite ruku pored predmeta i procenite udaljenost vrha predmeta. Pokušajte da zadržite poziciju nekoliko sekundi i vidite koliko ste sigurni u svoju procenu. Sada otvorite oba oka i primetićete kako se vaš osećaj dubine znatno poboljšava.
Edge Computing
Dok sistem kamera prikuplja podatke, ugrađeni računar (edge procesor) obrađuje sve ulaze u realnom vremenu kako bi odmah ažurirao sistem o trenutnom stanju okruženja. Iako tradicionalni zadaci mašinskog vida mogu biti isplativiji korišćenjem računarstva u oblaku, kod samovozećih automobila postoji preveliki rizik od zavisnosti o povezivanju sa oblakom, čak i ako je reč o spoljnom izvršavanju procesa obrade podataka za mašinski vid.
Korišćenjem edge računara za obradu ulaznih podataka eliminišu se problemi sa kašnjenjem i osigurava da se podaci primaju, obrađuju i koriste u realnom vremenu. Edge računari za samovozeće automobile koriste specijalizovane komponente koje integrišu AI grafičke procesore, poput NVIDIA Tensor Core i CUDA Core.
AI algoritmi
Algoritmi su oduvek bili ključni deo mašinskog vida. Algoritmi omogućavaju računaru da prepozna obrasce, oblike i boje koje pruža sistem kamera. Korišćenje veštačke inteligencije umesto tradicionalnih algoritama za mašinski vid znatno poboljšava sposobnost samovozećeg automobila da pouzdano identifikuje objekte, saobraćajne znake, oznake na putu i semafore. Mnogi AI algoritmi koriste se za obuku samovozećih automobila. Neki od najpopularnijih su:
- YOLO (You Only Look Once): Algoritam za detekciju objekata u realnom vremenu koji identifikuje i prati objekte u vidnom polju automobila.
- SIFT (Scale-Invariant Feature Transform): Koristi se za ekstrakciju karakteristika, pomaže automobilu da prepozna značajne tačke i objekte u svom okruženju.
- Histogram orijentisanih gradijenata (HOG): Koristi se za prepoznavanje objekata, fokusira se na izdvajanje lokalnih obrazaca i gradijenata sa slika.
- TextonBoost: Algoritam koji pomaže u prepoznavanju objekata analizom tekstura u okruženju.
- AdaBoost: Koristi se za klasifikaciju podataka, AdaBoost kombinuje više slabijih klasifikatora kako bi donosio pouzdane odluke o objektima i preprekama na putu vozila.
Važnost mašinskog vida u samovozećim automobilima
 Kredit za sliku:Automobile Italia/Flickr
Kredit za sliku:Automobile Italia/Flickr
Mašinski vid je primarni način na koji samovozeći automobili „osećaju“ i razumeju svoje okruženje. Bez mašinskog vida, samovozeći automobili bi se verovatno vratili na nivo 1 na skali autonomije vozila i možda nikada ne bi dostigli punu autonomiju.
Sa mašinskim vidom, samovozeći automobili sada su sposobni za klasifikaciju objekata, detekciju traka i signala, identifikaciju znakova i prepoznavanje saobraćaja.
Iako mnoga samovozeća vozila trenutno koriste različite senzore, poput LIDAR-a, RADAR-a i SONAR-a, svi se oni u velikoj meri oslanjaju na mašinski vid da bi „videli“ okruženje, identifikovali objekte i razumeli značenje znakova i semafora na putu. Dodatni senzori su tu samo da poboljšaju mašinski vid i unaprede bezbednost ljudi, životinja i imovine.
Međutim, mašinski vid može funkcionisati nezavisno, bez pomoći drugih senzora, da bi obezbedio mogućnosti autopilota. Zapravo, najnoviji Teslini samovozeći automobili su izbacili RADAR i sada se oslanjaju isključivo na mašinski vid za svoj sistem autopilota.
Iako ovo ne umanjuje korisnost drugih senzorskih tehnologija, pokazuje važnost i snagu mašinskog vida u samovozećim automobilima.
Budućnost mašinskog vida u autonomnim vozilima
Mašinski vid je temelj samovozećih automobila. Pomoću mašinskog vida, automobili mogu „videti“ i percipirati okruženje baš kao i ljudi. Iako izazovi i dalje postoje, prednosti mašinskog vida u smislu bezbednosti i navigacije ne mogu se zanemariti. U budućnosti autonomnih vozila, svaki dalji napredak u veštačkoj inteligenciji, edge computing-u i/ili tehnologiji kamera sigurno će učiniti samovozeće automobile naprednijim, što će ih verovatno pomeriti na viši nivo automatizacije.